技术背景
大型重载机械装备是是我国基础设施、资源开发和国防建设急需的重大技术装备。这类装备具有重承载、强冲击和极端环境运行的特点,液力驱动工作中大功率传递和液-固耦合现象极为突出。
技术优势
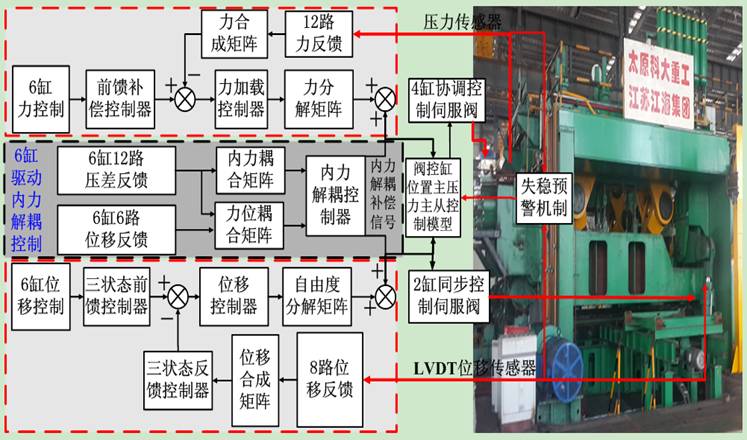
基于电液控制发明了阀控缸液压伺服系统的位置和压力主从控制方法,解决重载机械装备运行过程中位置和压力耦合干扰问题,实现多缸液压伺服系统位置和压力的精确控制。同时发明了液压滚切式金属板剪切机的液压系统,通过建立多变量解耦矩阵和多缸运动方程以及无节流损失的压力和位置双向精确控制方程,实现了液压泵、蓄能器组和伺服阀的同步控制,提高了阀控缸液压伺服系统的运动平稳性和可控性。提出多缸液压系统失稳判定方法,得到液压伺服系统稳定运行的必要条件,提高大型重载设备的稳定性。
经济性评估
使用了本系统之后,能够明显的降低了液压系统的冲击;解决了液-固耦合现象;增加了设备的稳定性,降低了安全事故带来的巨大经济损失和社会损失。
合作方式
技术合作